




产品特点:
FANUC Robot R-2000iC 210F/165F/125L凝聚了FANUC多年的经验及技术,是以高可靠性和优异的性价比见长的万能智能机器人。可以在弧焊、搬运、组装等各种应用领域为用户做出贡献。实现了机器人机构部的轻量化、苗条化。

通过轻量化的手臂和最新的控制技术大幅度提高了动作性能,从而大幅度提高了生产效率。能够提供以点焊改良电缆手臂为代表的多种多样的可选配置,从而满足用户的各种要求。使用最新的机器人控制装置 R-30iB。通过使用电力再生可选配置及小型化的控制装置,可以实现节能、节约空间。可以使用学习机器人功能、散堆工件拾取功能、力觉控制功能、视觉追踪功能等各种最新的智能化功能。

产品参数:
|
项目 |
规格 |
||||||||
|
R-2000iC/210F |
R-2000iC/165F |
R-2000iC/125L |
|||||||
|
机构 |
多关节型机器人 |
||||||||
|
控制轴数 |
6轴(J1、J2、J3、J4、J5、J6) |
||||||||
|
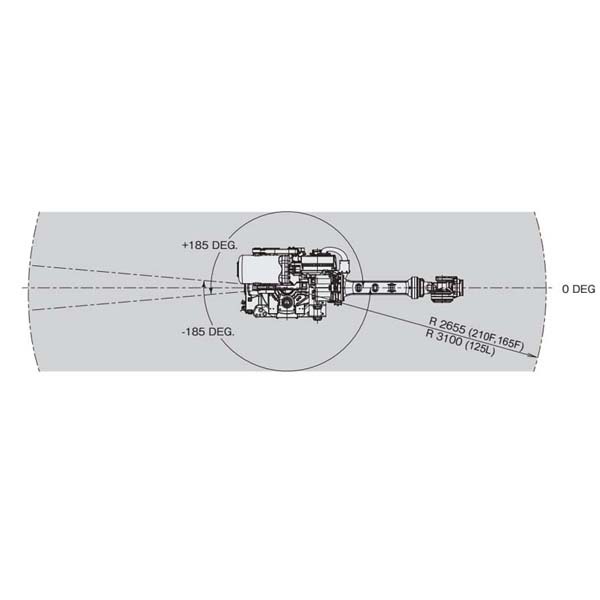
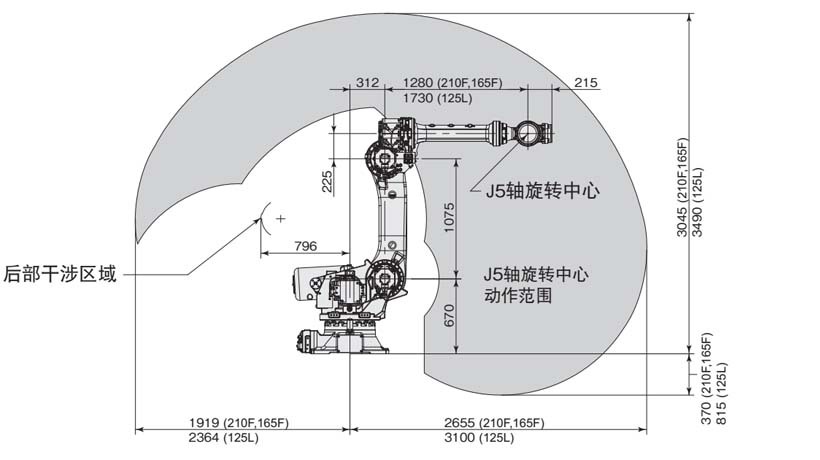
可达半径 |
2655mm |
2655mm |
3100mm |
||||||
|
安装方式 |
地面安装 |
||||||||
|
动
作
范
围 |
J1轴旋转 |
370°(120°/s) |
370°(130°/s) |
370°(130°/s) |
|||||
|
J2轴旋转 |
136°(105°/s) |
136°(115°/s) |
136°(115°/s) |
||||||
|
J3轴旋转 |
312°(110°/s) |
312°(125°/s) |
301°(125°/s) |
||||||
|
J4轴手腕旋转 |
720°(140°/s) |
720°(180°/s) |
720°(180°/s) |
||||||
|
J5轴手腕摆动 |
250°(140°/s) |
250°(180°/s) |
250°(180°/s) |
||||||
|
J6轴手腕旋转 |
720°(220°/s) |
720°(260°/s) |
720°(260°/s) |
||||||
|
最
高
速
度 |
J1轴旋转 |
6.46rad(2.09rad/s) |
6.46rad(2.27rad/s) |
6.46rad(2.27rad/s) |
|||||
|
J2轴旋转 |
2.37rad(1.83rad/s) |
2.37rad(2.01rad/s) |
2.37rad(2.01rad/s) |
||||||
|
J3轴旋转 |
5.45rad(1.92rad/s) |
5.45rad(2.18rad/s) |
5.25rad(2.18rad/s) |
||||||
|
J4轴手腕旋转 |
12.57rad(2.44rad/s) |
12.57rad(3.14rad/s) |
12.57rad(3.14rad/s) |
||||||
|
J5轴手腕摆动 |
4.36rad(2.44rad/s) |
4.36rad(3.14rad/s) |
4.36rad(3.14rad/s) |
||||||
|
J6轴手腕旋转 |
12.57rad(3.84rad/s) |
12.57rad(4.54rad/s) |
12.57rad(4.54rad/s) |
||||||
|
手腕部可搬运质量 |
210kg |
165kg |
125kg |
||||||
|
J2基座可搬运质量 |
550kg |
550kg |
550kg |
||||||
|
J3手臂部可搬运质量 |
25kg(A) |
(A)+(B)<50kg |
20kg(A) |
(A)+(B)<50kg |
25kg(C) |
(C)+(D)<40kg |
|||
|
J3外壳上可搬运质量 |
50kg(B) |
20kg(B) |
40kg(D) |
||||||
|
手腕允许 负载转矩 |
J4轴 |
1360N·m 139kgf·m |
940N·m 96kgf·m |
710N·m 72kgf·m |
|||||
|
J5轴 |
1360N·m 139kgf·m |
940N·m 96kgf·m |
710N·m 72kgf·m |
||||||
|
J6轴 |
735N·m 75kgf·m |
490N·m 50kgf·m |
355N·m 36kgf·m |
||||||
|
手腕允许负载 转动惯量 |
J4轴 |
147kg·m2 1500kgf·cm·s2 |
89kg·m2 908kgf·cm·s2 |
72kg·m2 735kgf·cm·s2 |
|||||
|
J5轴 |
147kg·m2 1500kgf·cm·s2 |
89kg·m2 908kgf·cm·s2 |
72kg·m2 735kgf·cm·s2 |
||||||
|
J6轴 |
82kg·m2 837kgf·cm·s2 |
46kg·m2 469kgf·cm·s2 |
40kg·m2 408kgf·cm·s2 |
||||||
|
驱动方式 |
使用AC伺服电机进行电气伺服驱动 |
||||||||
|
重复定位精度 |
±0.02mm |
||||||||
|
机器人质量 |
1090kg |
1090kg |
1115kg |
||||||
|
安装条件 |
环境温度:0~45℃ 环境湿度:通常在75%RH以下(无结露现象) 短期在95%以下(一个月内) 振动加速度:4.9m/s2(0.5G)以下 |
||||||||


 898995850
898995850




