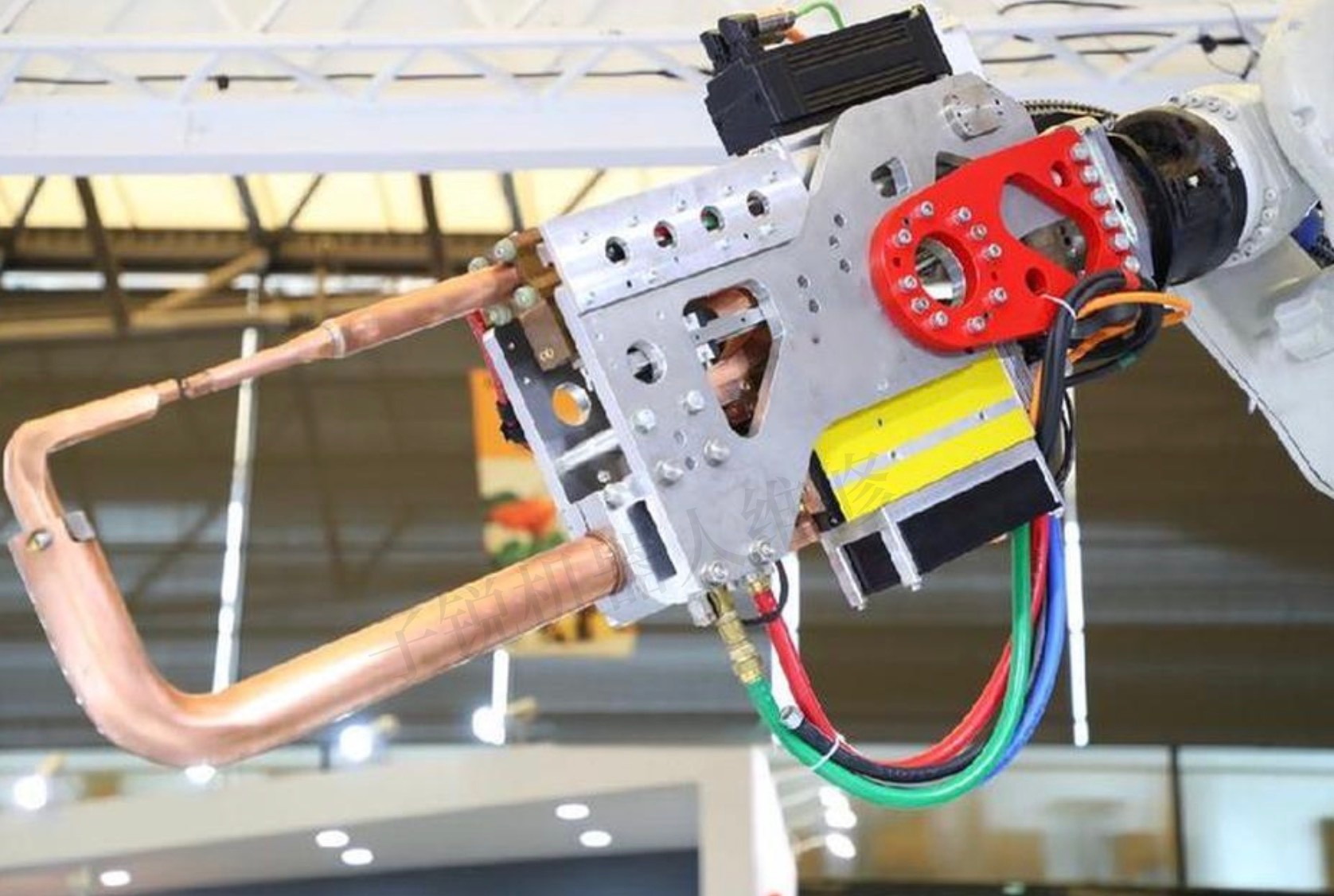
在开始维修之前,我们首先需要了解安川YASKAWA机器人OBARA小原点焊焊钳马达的基本结构和工作原理。伺服马达主要由定子、转子、编码器、轴承和驱动器等部分组成。定子上的绕组通电后产生旋转磁场,转子在磁场作用下旋转,从而输出扭矩。
子锐机器人维修安川机器人,OBARA小原点焊维修常见型号包括:
苏州OBARA小原DB6-10OR1焊机变压器故障维修
北京OBARA小原主板PC-1077D-00A维修
上海小原机器人焊钳控制器SIV21Y-6M维修
河南YASKAWA安川OBARA小原点焊焊钳伺服马达维修
南京OBARA小原焊机SIV326-2002428维修
青岛小原DB6-10OR1焊机变压器故障主板PC-1077D-00A维修
厦门OBARA小原中频SIV32自适应控制器维修
太原OBARA小原点焊焊钳控制器SIV31C-6A维修
河北小原OBARA机器人焊钳主板PCN-2002121维修
成都OBARA小原机器人点焊焊钳SIV21CY-6M控制器维修
合肥OBARA小原逆变焊机维修SIV326-2002428维修
武汉小原OBARA点焊PC-1100C电路板维修维修
秦皇岛小原点焊机变压器DB6-10OR1维修
湖北小原控制器SIV32C-6-M子锐机器人维修
唐山安川YASKAWA机器人OBARA小原焊钳伺服电机维修
天津小原OBARA电路板PCN-2002088维修
· 安川YASKAWA机器人OBARA小原点焊焊钳马达常见故障类型及维修方法·
1、轴承故障:轴承是支撑转子旋转的关键部件,长时间的高速旋转和恶劣的工作环境容易导致轴承磨损或损坏。表现为安川YASKAWA机器人OBARA小原点焊焊钳马达运转不平稳、噪音增大等。维修方法包括使用专业的轴承拆卸工具将损坏的轴承拆下;清洗轴承座并检查是否有磨损或裂纹;安装新的轴承,并确保游隙和预紧力符合要求。
2、过载故障:当安川YASKAWA机器人OBARA小原点焊焊钳马达长时间承受过大负载或频繁启动停止时,容易导致过载故障。表现为马达发热、转速下降或完全停止工作。维修方法包括检查负载情况,确保在额定范围内;检查马达散热系统,清理散热片和风扇上的灰尘和杂物;若过载保护器损坏,需及时更换。
3、驱动器故障:驱动器是安川YASKAWA机器人OBARA小原点焊焊钳马达的控制核心,负责接收上位机的指令并控制马达的运转。若驱动器出现故障,会导致马达无法正常工作或性能下降。维修方法包括检查驱动器的电源和接地情况;使用示波器检测驱动器的输出波形是否正常;若驱动器损坏,需更换新的驱动器,并进行参数设置和调试。


 898995850
898995850




