


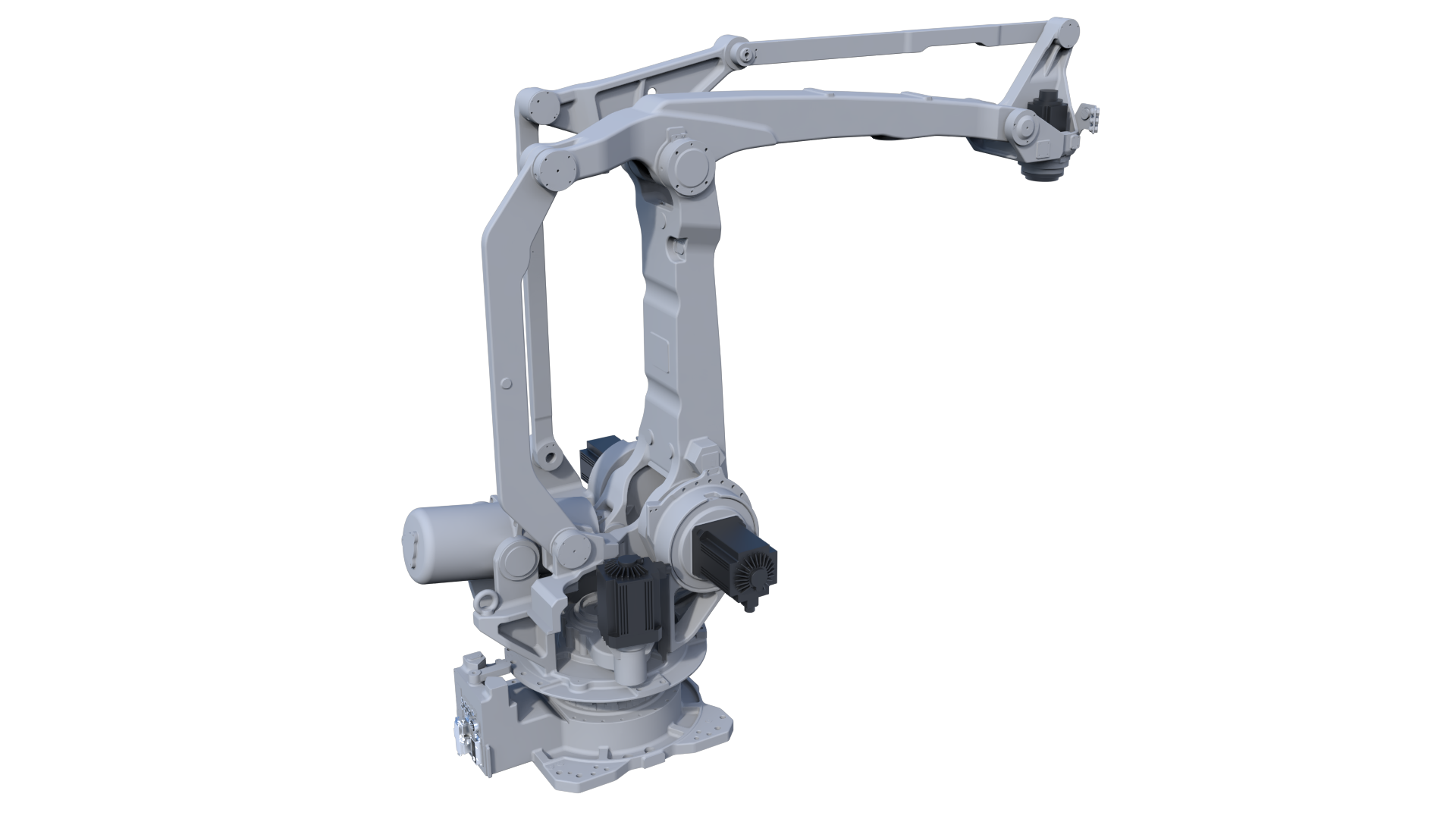
四轴焊接机器人是一种数字化、可实现四轴联动的专用数控焊接设备,焊接范围广,操作简便,精准性焊接,效率高,产品稳定性好。
结构组成
机器人本体、机器人控制柜、焊接电源系统、焊接传感器及系统安全保护设施、焊接工装工具
技术参数
|
轴数 |
4轴 |
|
|
有效载荷 |
100kg |
|
|
重复定位精度 |
±0.15mm |
|
|
臂展 |
2308mm |
|
|
本体防护等级 |
IP65 |
|
|
电柜防护等级 |
IP43 |
|
|
环境温度 |
0-45° |
|
|
安装方式 |
地面安装,支架安装 |
|
|
本体质量 |
580kg |
|
|
功能 |
搬运,码垛,上下料 |
|
|
运动范围 |
1轴 |
±150° |
|
2轴 |
+35°-55° |
|
|
3轴 |
+60°-50° |
|
|
4轴 |
±360° |
|

特点
1.起弧收弧时间准确控制;
2.可根据产品任意编程;
3.焊接起始位置可精准控制;
4.焊缝美观均匀饱满;
5.设计高度紧凑,可灵活选择;
6.产品周期明确,容易安排生产计划;
7.可缩短产品换代的周期,减小相应的设备投资;
8.可实现小批量产品焊接自动化。
应用领域
广泛应用于汽车制造和汽车零部件制造、工程机械、五金建材、船舶、航空航天等领域

使用操作流程
1.检查点检设备、工装等,并做好相应的记录;
2.接通机器人控制箱焊机等电源;
3.检查机器人是否启动完毕;
4.检查机器人门机连锁装置是否到位,正常工作门是关闭状态;
5.检查气压指针是否正常;
6.加入伺服电源,伺服电源指示灯亮起;
7.向焊接夹具上装入工件,压紧检查是否正确;
8.根据焊接工位,在相应的控制面板启动操作;
9.机器人一面工位启动焊接时,再向另一面工位加入焊件,待完成焊接工作后,机器人会自动翻转启动;
10.检查工件上的焊缝质量,进行相应的调整;
11.工作结束取下工件。
 898995850
898995850




